
 抖音app正版短视频
抖音app正版短视频 手机淘宝app客户端
手机淘宝app客户端 快手2025最新版官方正版
快手2025最新版官方正版 网易云音乐app正版
网易云音乐app正版 爱奇艺app最新客户端
爱奇艺app最新客户端 新浪微博Weibo手机版
新浪微博Weibo手机版 小红书app下载安装
小红书app下载安装 金山办公WPS Office手机官方最新版
金山办公WPS Office手机官方最新版 京东商城官方客户端
京东商城官方客户端 qq下载2024最新版
qq下载2024最新版







编辑点评:陀螺仪采样率设置器
专门为fps射击类枪战游戏打造的陀螺仪采样率设置器,陀螺仪修复器app最新免费版,中文简洁版,功能纯粹好用,可以快速调整陀螺仪采样率,根据游戏中的需要来高,是打FPS枪战游戏必备的神器,软件完全免费使用,欢迎下载收藏。

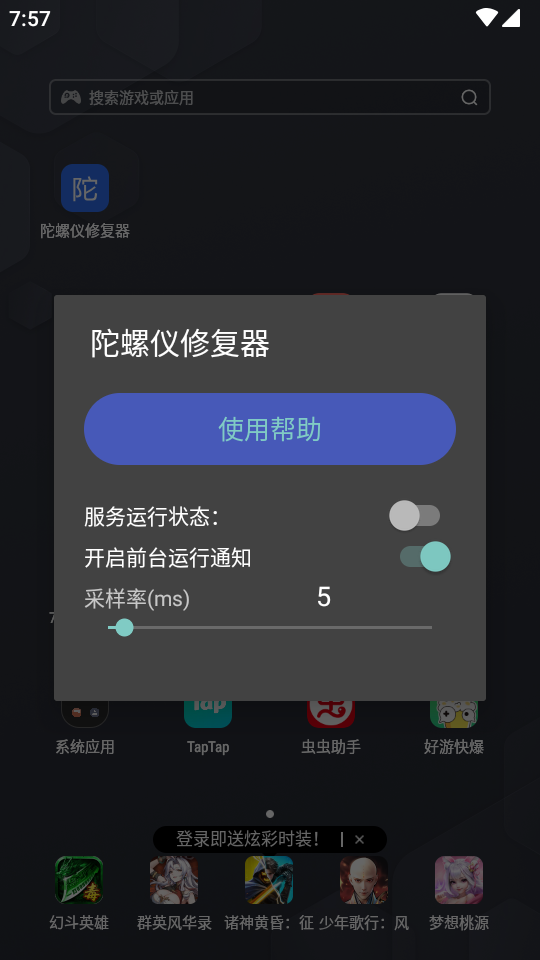
陀螺仪修复器怎么用
1、先在本站下载最新版本的软件安装好。
2、打开软件后根据自己的需要来调节采样率即可。
3、支持高前台运行通知和服务运行状态。
陀螺仪修复器采样率是多少
1、陀螺仪配置,使用在线零偏

2、采集的陀螺仪数据

3、矫正之后的陀螺仪数据

4、效果异常的情况下确认
1、镜头视场角是否异常
2、陀螺仪方向标定是否正常,正常的情况下矫正之后的数据在0上下震动
3、确认在线零偏是否正常,
4、防抖模式用的录像模式,record或者叫ipc
5、确认陀螺仪数据组数是否正常,
5.1,测试用的陀螺仪用的是 iim42652,用的fifo模式取数据,采样率为1000HZ的时候间隔时间为5ms一次,时间太长陀螺仪数据会缺失,这是针对hi3516dv500的获取数据的时候,不同的芯片不一样,根据厂家提供说明配置,测试的时候配的50ms一次,帧间隔33ms,每次智能取到一部分数据,后间隔50ms的数据还没取到
陀螺仪驱动中设置spi采集频率,间隔多久采样一次

5.2,hi3516dv300在vi获取的陀螺仪数据,设置裁剪坐标之后在vpss做的裁剪
6、防抖效果尽量在曝光时间小于10ms的时候测,太小的话效果不佳
7、默认spi通信10M的通信数据,i2c的话数据低有可能数据拿到不及时
8. vi chn开低延时的时候,开陀螺仪防抖画面会来回缩放,关闭vi chn的低延时就好
陀螺仪修复器采样原理
物体在旋转时,其旋转轴在不受外力影响的情况下,旋转轴所指方向不变。因此可以用来测量角位移或角速度。
1、核心工作原理:角动量守恒定律角动量守恒定律是指系统所受合外力矩为零时系统的角动量保持不变。
角动量的定义:物体矢径和其动量的叉积
(1)矢量的计算:叉积和点积
假设a、b为两个矢量,之间的夹角为θ,则
点积:a ・ b = abcosθ(标量)
叉积:a x b = absinθ(矢量,方向由右手螺旋定则决定,四指由a弯向b,大拇指方向即为叉积方向)
(2)角动量计算:物体矢径和动量的叉积
r为矢径,数值为物体到旋转中心的距离,方向为旋转中心指向物体的方向矢量;p为动量,数值为物体质量与线速度的乘积p=mv,方向为线速度v的方向;

以该图的方向为例,依据角动量公式,可以得到角动量L的方向为竖直向上
(3)陀螺的角动量守恒
假设一个陀螺不受空气阻力(合外力力矩=0),陀螺与地面的接触面无限小(矢径=0),则角动量的合力矩为0,即角动量守恒。
2、陀螺仪的基本特性:定轴性、进动性
(1)定轴性
当陀螺转子以高速旋转时,在没有任何外力矩作用在陀螺仪上时,陀螺仪的自转轴在惯性空间中的指向保持稳定不变,即指向一个固定的方向;同时反抗任何改变转子轴向的力量。这种物理现象称为陀螺仪的定轴性或稳定性。
(2)进动性
当转子高速旋转时,若外力矩作用于外环轴,陀螺仪将绕内环轴转动;若外力矩作用于内环轴,陀螺仪将绕外环轴转动。其转动角速度方向与外力矩作用方向互相垂直。这种特性,叫做陀螺仪的进动性。
3、测量的物理量
(1)角速度
测量的物理量是偏转、倾斜时的转动角速度
(2)方向
俯仰角(pitch):绕x轴旋转
偏航角(yaw):绕z轴旋转
翻滚角(roll):绕y轴旋转

4、核心参数
通用参数(传感器)
线性误差:传感器测量值与实际物理值之间的误差
分辨率:可检测到的最小物理量单位
采样频率:单位时间内的采样次数
陀螺仪重要参数
量程:为角速度单位(dps,degree per second)
灵敏度(刻度因子):最小分辨的角速度
灵敏度初始误差
灵敏度动态误差
非线性度:满量程的误差
初始零漂
零漂温度系数
5、惯性导航原理惯性导航利用陀螺仪和加速度计测量载体在惯性参考系下的角速度和加速度,并对时间进行积分、运算得到速度和相对位置,且把它变换到导航坐标系中,这样结合最初的位置信息,就可以得到载体现在所处的位置。
常见问题
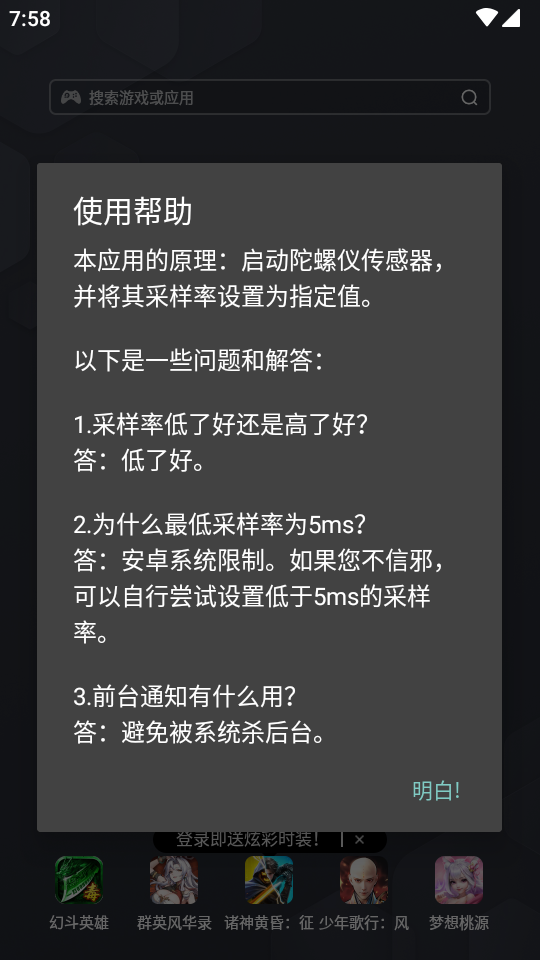
本应用的原理:启动陀螺仪传感器,并将其采样率设置为指定值。以下是一些问题和解答:
1.采样率低了好还是高了好?
答:低了好。
2.为什么最低采样率为5ms?
答:安卓系统限制。如果您不信邪,可以自行尝试设置低于5ms的采样率。
3.前台通知有什么用?
答:避免被系统杀后台。
 Actxa智能手环软件5.4.4 最新版
Actxa智能手环软件5.4.4 最新版 Omni工具集软件v1.2 安卓版
Omni工具集软件v1.2 安卓版 一个工具助手软件v1.0.2 安卓版
一个工具助手软件v1.0.2 安卓版 Fishby软件手机版V1.0.1 安卓最新版
Fishby软件手机版V1.0.1 安卓最新版 大疆DJI Home手机版1.2.1 最新版
大疆DJI Home手机版1.2.1 最新版 嗖嗖云手机app最新版v2.5.01.013 安卓版
嗖嗖云手机app最新版v2.5.01.013 安卓版 微商截图宝会员版无水印免费v3.1 最新版
微商截图宝会员版无水印免费v3.1 最新版 xthzpro北幕工具箱手机版v3.2 安卓版
xthzpro北幕工具箱手机版v3.2 安卓版 创作精灵app官方版v1.0.3 安卓免费版
创作精灵app官方版v1.0.3 安卓免费版 腾讯翻译君手表版v1.0.0.21 安卓版
腾讯翻译君手表版v1.0.0.21 安卓版 YTDLnis中文版手机版v1.8.1 安卓版
YTDLnis中文版手机版v1.8.1 安卓版 椒盐工具箱app正版v1.0.1 安卓手机版
椒盐工具箱app正版v1.0.1 安卓手机版 天津大学融合门户app官方版v1.0.0.5.2 安卓最新版
天津大学融合门户app官方版v1.0.0.5.2 安卓最新版 快换图标app手机版v1.0.1 安卓版
快换图标app手机版v1.0.1 安卓版 花梦软件库简洁干净版v6.7 最新版
花梦软件库简洁干净版v6.7 最新版 LoFit手环连接app1.3.5 手机版
LoFit手环连接app1.3.5 手机版 夸克CK不限速提取器手机版v2.0 安卓版
夸克CK不限速提取器手机版v2.0 安卓版 小阳Tool软件v1.0.2 最新版
小阳Tool软件v1.0.2 最新版 模拟定位神器安卓版免费v2023.12.26 手机版
模拟定位神器安卓版免费v2023.12.26 手机版 MateAI解锁VIP版v1.3.1 专业版
MateAI解锁VIP版v1.3.1 专业版 好用魔方软件v5.3.0006.20241127 安卓版
好用魔方软件v5.3.0006.20241127 安卓版















 文档扫描软件
文档扫描软件 免费的手机扫描app
免费的手机扫描app 音乐播放手机软件
音乐播放手机软件 AI视频制作软件
AI视频制作软件 手机最好的图片编辑器
手机最好的图片编辑器 光速虚拟机安卓正版
光速虚拟机安卓正版
 ToDesk远程软件app
ToDesk远程软件app
 精品下载站app官方版
精品下载站app官方版
 豌豆荚应用商店安卓版
豌豆荚应用商店安卓版
 麻吉分身2024官方版
麻吉分身2024官方版
 蓝莓工具箱
蓝莓工具箱
 LuoJuBoxX聚箱工具箱
LuoJuBoxX聚箱工具箱
 智简云iapp源码平台
智简云iapp源码平台
 KDE Connect 安卓版手机版
KDE Connect 安卓版手机版
 玩机百宝箱官方正式版
玩机百宝箱官方正式版
热门评论
最新评论